Vehicles
UAM vehicles are flying vehicles that transport either passengers or freight on specific point-to-point routes within urban areas. Due to the constraints of buildings, plants, road traffic and crowds in cities, the ideal vehicle models need to be autonomous, small, efficient, nimble and maneuverable, with the ability to take off and land vertically (as opposed to with a runway)
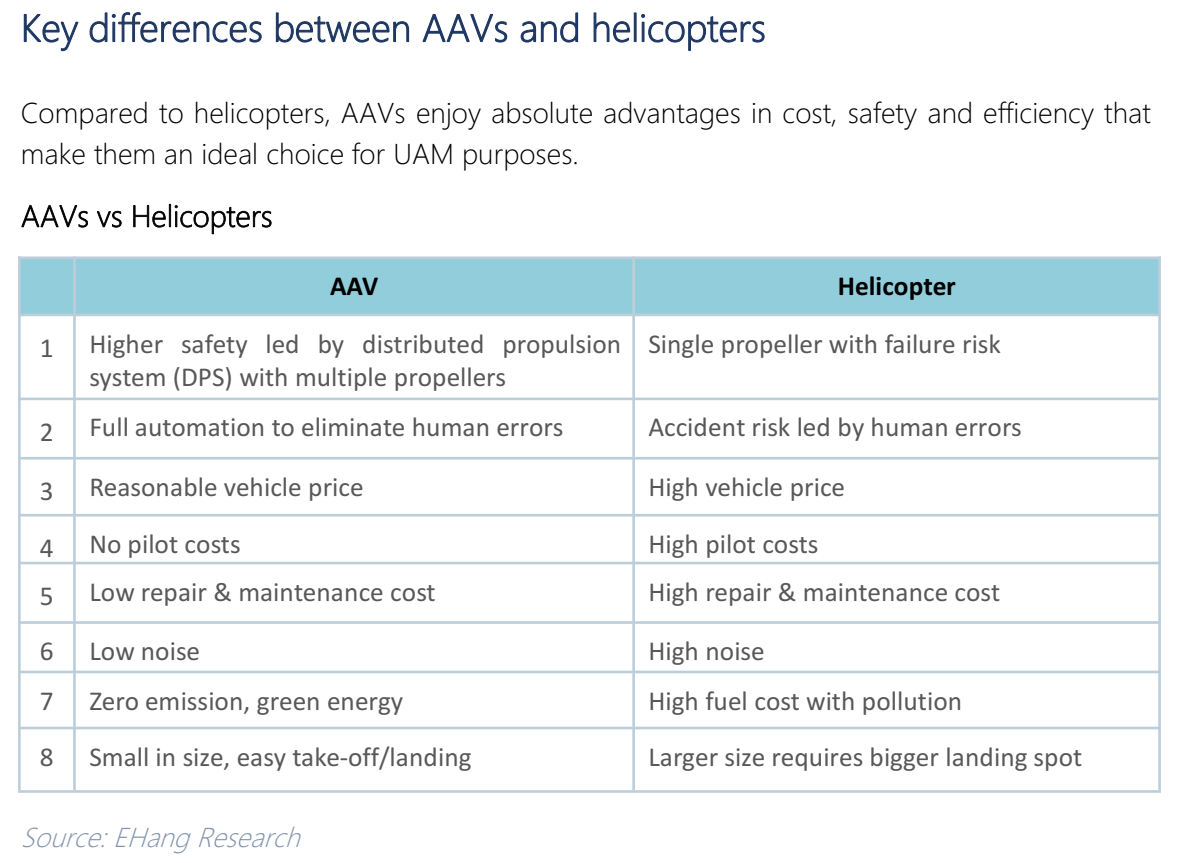
Safety first – As a top priority, safety should form the very foundation for any designs ofcUAM vehicles. Simply speaking, the following as the key factors to ensurecmaximum safety:
- Power redundancy provided by multiple motors and propellers (e.g. distributed electric propulsion, or DEP);
- Complete autonomous operations to eliminate human errors caused by the pilots;
- Backup from duplicate flight control, communication and navigation systems;
- Centralized command-and-control to ensure safe operations;
- Intelligent obstacle avoidance capabilities (e.g. millimeter radar, visual positioning, etc.);
- Intelligent self-detection capabilities to constantly monitor vehicles automatically.
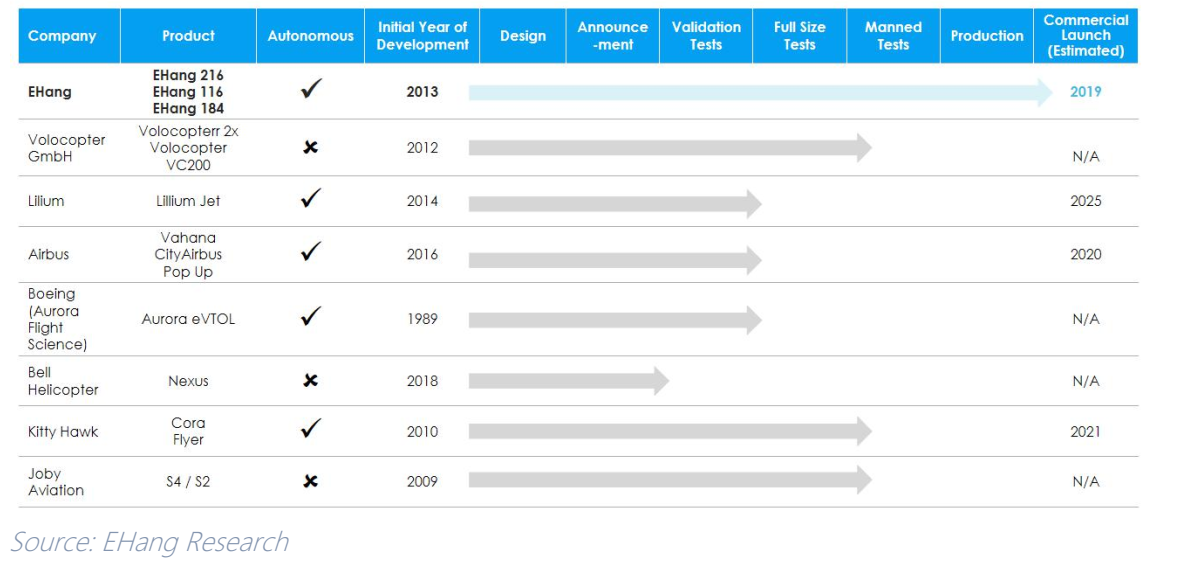
To that end, special algorithms need to be developed and “burned into” hardware systems to make the vehicles safe and smart. While many prototypes have been built in recent years by firms such as Airbus (A³
Vahana), Boeing (PAV), Lilium (Lilium Jet), Volocopter (VC2) and Kitty Hawk (Cora), EHang has been the first company to successfully launch serial production of its EH216 and EH116 AAVs for autonomous, manned flights.
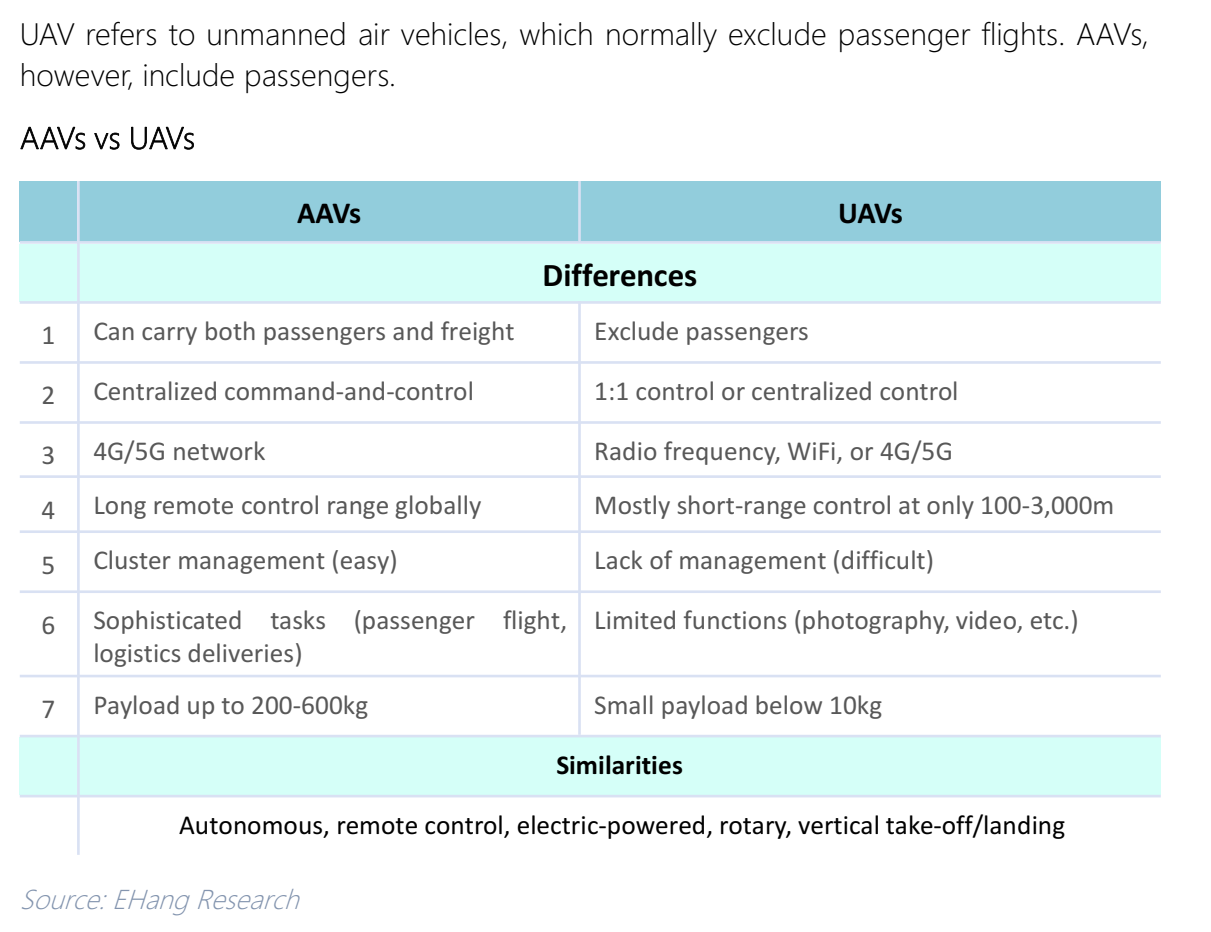
The term “autonomous aerial vehicle” (AAV) was first created by EHang, a China-based UAM firm that launched the EHang 184, the world’s first AAV at CES in Las Vegas in 2016. Powered by eight 12kw electric motors and remotely controlled by a computer platform, the EHang 184 requires no pilot on board and can carry one passenger for a 20-minute flight. Basically, the AAV was built upon the principles of “safe, smart, platform controlled, connected and eco-friendly”.

Command-and-Control Platform
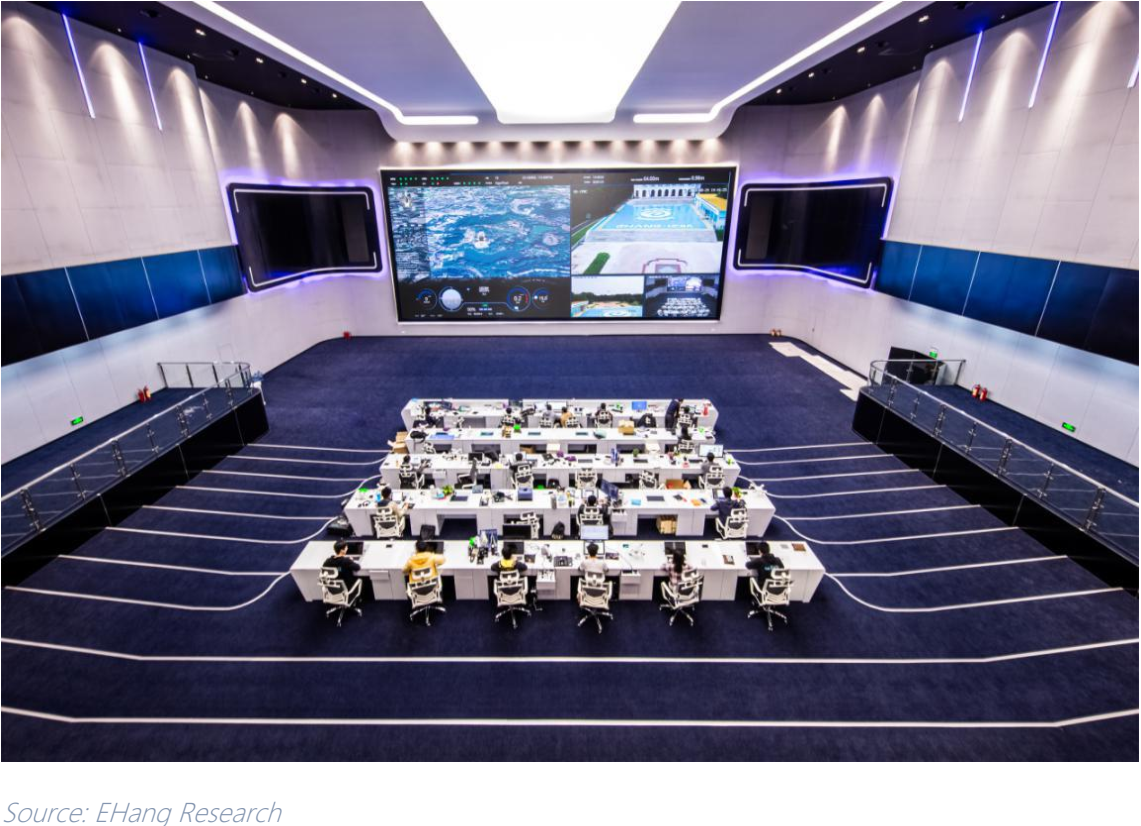
Unlike conventional transportation modes like cars or airplanes, a UAM system requires a centralized remote command-and-control platform to perform multiple tasks autonomously. With the help of computer programs and cluster management techniques, the platform is able to control the flights of thousands of UAM vehicles simultaneously. Specific flight tasks are coded, registered, executed and monitored to ensure safety, efficiency and quality. Thus, complex traffic situations become manageable.
There are also significant city management benefits: a single platform in a metropolitan area would be able to prevent accidents and traffic congestion as well as to improve city operations by integrating various municipal functions like police, emergency response, healthcare, firefighting, forestry, fishing, tourism, etc., forming an instrumental part of a “smart city” urban planning system.
Note that the command-and-control center concept is different from the FAA’s UTM (Unmanned Aircraft System Traffic Management) system, which is a "traffic management" ecosystem for uncontrolled operations. According to the FAA, “UTM development will ultimately identify services, roles and responsibilities, information architecture, data exchange protocols, software functions, infrastructure, and performance requirements for enabling the management of low-altitude uncontrolled drone operations.” By contrast, a centralized command-and-control platform ensures all air vehicles are registered and controlled to fly on specific routes set by computers.
Navigation and Positioning System
Normal GNSS including GPS, Galileo, BDS and GLONASS are available to provide necessary navigation services to UAM systems. For more precise navigation needs in more complicated situations (e.g. logistics eliveries to office buildings, landing in crowded areas), ground facilities are added to augment the functions of the satellite systems. Moreover, a visual positioning system (VPS) can be added to help the UAM vehicles when GPS signal is poor or lost. So far, the communications between UAM vehicles and the command-and-control platform are conducted through a 4G network. The adoption of 5G technologies will significantly boost the capabilities and functions of future UAM systems.

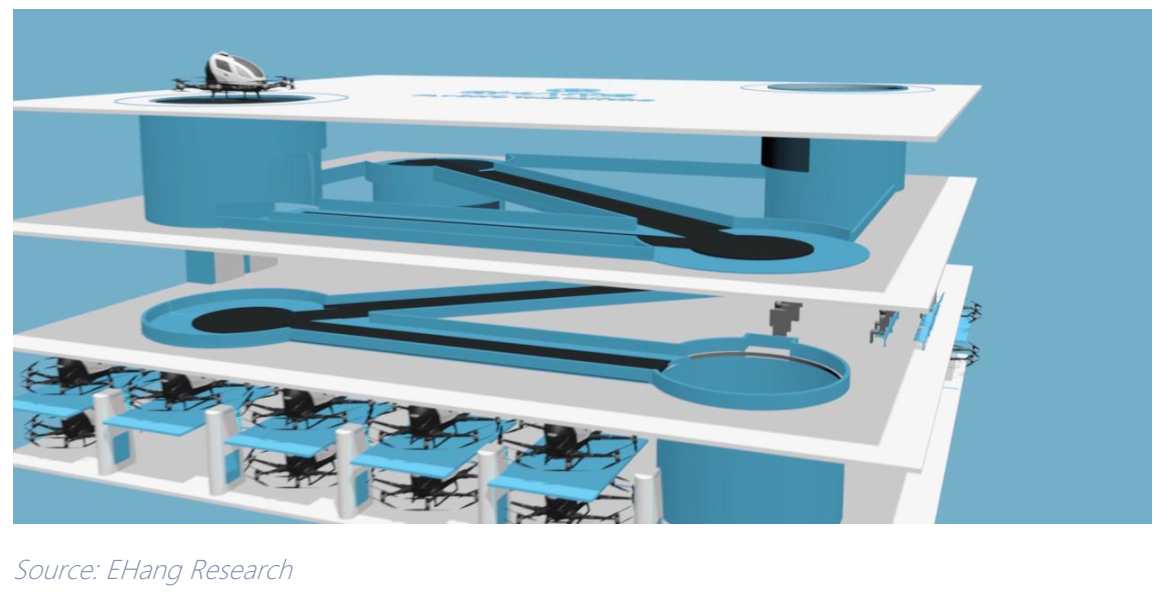
Base Points
UAM base point is as a ground site for a UAM vehicle to land and take off. Each base point needs to be identified and registered in the UAM system so UAM vehicles can travel only between the base points, which are the only valid sites for passengers to board and alight. Based on traveling demand, new base points can be created and added into the UAM system continuously, so the overall UAM service network continues to expand. The size and importance of each base point are determined by the density of air routes and traffic volumes. It can be either a single pick-up / landing point or a hub station with multiple landing pads, charging docks, waiting areas and other facilities. Although the UAM routes are linked only point-to-point, further expansion of the network can accommodate the demand for more convenient service locations.
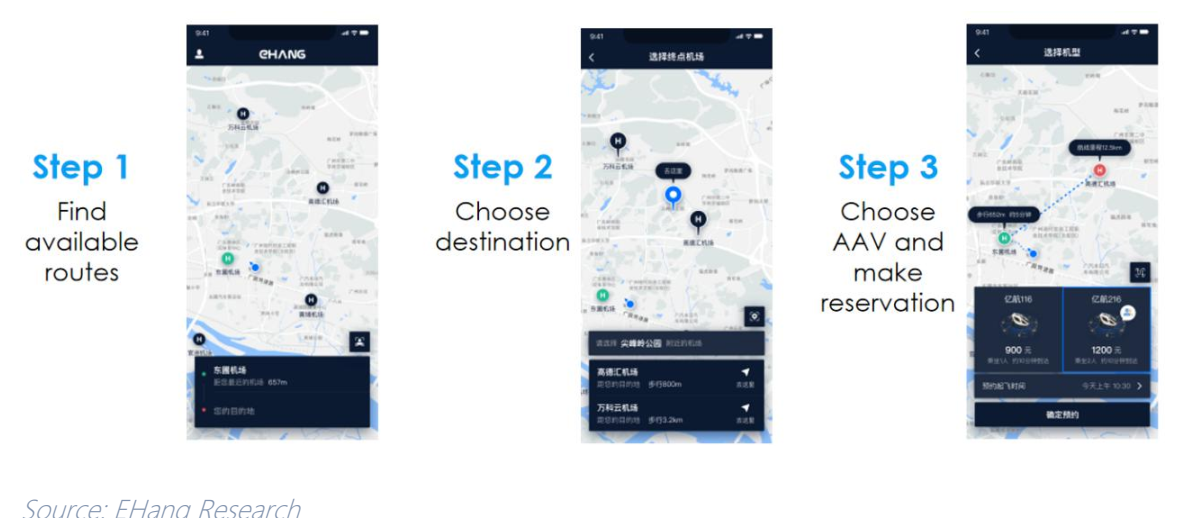
Interface
Based on computer software and programs, a UAM interface takes the form of a mobile app similar to what users are used to from ridesharing apps, which allows customers to place orders and pay for services online. A UAM app would be a real-time information system that connects the front-end platform to the back-end command-and-control system. By sharing the real-time information about passengers and vehicles, it would allow both UAM operators and the customers to locate the nearest base point with available vehicles in specific zones and dispatch traveling orders.