Introduction
A missile seeker is composed of a seeker head to collect and detect energy from the target, a tracking function to keep the seeker boresight axis pointed toward the target, and a processing function to extract useful information from the detection and tracking circuits.
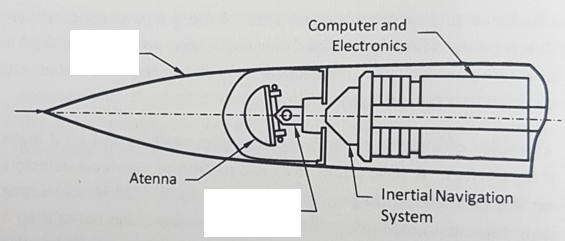
The seeker usually is mounted in the nose of the missile where it can have an unobstructed view ahead. The seeker antenna or optical system is usually mounted on gimbals to permit its central viewing direction (boresight axis) to be rotated in both azimuth and elevation relative to the missile centerline). The limits of the angular viewing direction (gimbal angle limits) are typically about + 40 to + 60 deg relative to the centerline axis of the missile. If the angle between the missile centerline and the line-of-sight to the target exceeds the gimbal angle limits, the seeker is physically constrained by the gimbal stops and can no longer track the target.
The gimbaled portion of the seeker head usually is stabilized to keep it pointing in a fixed direction regardless of perturbing angular motions of the missile body. The two most prevalent means of stabilization are to spin a portion of the gimballed components so that they act as a gyro and to use actuators to hold the seeker in a stabilized direction using control signals from gyros mounted on the gimbal frames. In either case, signals from the tracking circuitry are required to change the pointing direction of the seeker.
The two common seeker types are optical and radio frequency (RF). The methods and equipment used to sense signals in the optical and RF bands are different so they lead to different implementations of the two types of seekers.