The goniometer method allows to continuously determine the height at which the target is located. For this purpose, the reflected signals from the target are applied from two antennas to the receiver's input, through inductive coupling.
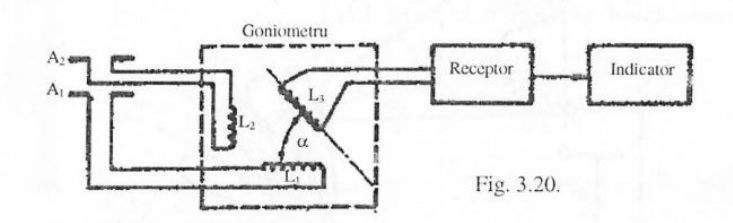
The goiometer contains two fixed coils (L¹ and L²) and a mobile coil (L³). To the receiver is applied the signal induced in the coil L³. Through the L¹ and L² coils, the currents are a function of the angle of elevation of the target ε.
I¹=k·φ¹(ε)
I²=k·φ²(ε)
The antennas are identical, but installed at different heights, and the proportionality factor k is the same for both antennas. The electromotor voltage induced in the L³ coil is
E=I¹ωM¹+I²ωM²
unde
M¹-mutual induction between L¹ and L³ coils
M²-mutual induction between L² and L³ coils
ω-pulsation of the signal
E=ωk( M¹·φ¹(ε)+M²·φ²(ε)
M¹ si M² depend on relative position of the induction
M¹=Mmax·cosα= Mcosα
M²=Mmax·sinα= Msinα
Results
![]()
The operator can change the position of the L³ coil, choosing the angle α so that at the receiver input the signal becomes null, E=0.
The relationship can be solved with the help of abattoirs, resulting in the angle of ascension. The disadvantage of the method lies in the fact that when measuring the elevation angle, the signal is null on the indicator. In this situation a special indicator should be used.
The goniometer is mounted on radar stations that work in the range of metric waves, which form the characteristic of directivity by reflection with the earth, when changing the station position being necessary calibration flights.