Radar Fundamentals
The cognitive radar
Cognitive radar is a new paradigm to conceive the next radar generation characterized by unique and amazing features inspired to mental abilities and processes related to knowledge. Introduced by Haykin [1] and Guerci [2], it is attracting huge attention within the radar community during the last few years. The key concept is that radar system performance can be enhanced through a continuous and coordinated feedback between the transmitter and receiver which implies a dynamic adaptation of the sensor’s algorithms to the operational context and environmental replies. This paper discusses the biological inspiring principles of cognitive radar and analyzes the resulting conceptual architecture. Then, three challenging radar signal processing applications, which can significantly benefit from cognition, are illustrated highlighting the potential performance benefits achievable with the awesome pro-active paradigm.
Cognitive Radar Paradigm
Cognitive dynamic systems have been inspired by the unique neural computational capability of brain and the viewpoint that cognition (in particular the human one) is a form of computation. Some exemplifications within this new class, which is undoubtly among the hallmarks of the 21st century, are cognitive radar, control, radio, and some other engineering dynamic architectures. S. Haykin published two pioneering articles in the context of the cognitive radar [3], [4]. The key idea behind this new paradigm is to mimic the human brain as well as that of other mammals with echolocation capabilities (bats, dolphins, whales, etc). They continuously learn and react to the stimulations from the surrounding environment according to four basic processes: perception-action cycle, memory, attention, and intelligence. This last observation highlights the importance of specifying which are the “equivalents” of the aforementioned activities in a cognitive radar. This is thoroughly discussed in [2], [5], and [6].
The perception-action process, schematized as in Figure 1, has the fundamental task of sounding the environment. Radar transmitter through the waveform emission stimulates the background with the goal to obtain a response (i.e. a radar echo) from it. The mentioned response is perceived by the radar receiver which plays the equivalent role of the human senses.
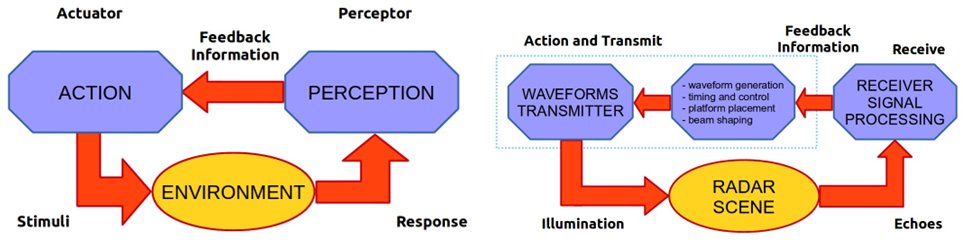
Figure 1: Schematic representation of the perception-action process.
Attention requires processing the perceptor output to extract information and to selectively concentrate on some discrete aspect of information. It can require system actions for prioritizing the allocation of available resources in accordance with their importance (for instance a detection in a give range-azimuthDoppler bin usually involves a confirmation process which calls for a specific radar waveform optimized to the actual interference/clutter conditions and the Doppler bin under test [7], [8]). As to intelligence, among the aforementioned four functions, it is by far the most difficult to describe. While intelligence functionalities are based on the perception-action cycle, memory, and attention, it is the presence of a feedback at multiple levels that makes possible for the system intelligent decisions in face of inevitable uncertainties in the environment. As matter of fact, the presence of such a closed-loop feedback between the actuator (transmitter) and the perceptor (receiver) represents the main ingredient which makes unique the cognitive radar and clearly distinguishes it from the classic adaptive architecture. In this last case adaptivity is mainly confined at the receiver branch except for some static forms of transmit diversity [2] usually implemented in terms of mode selection (i.e. long-range versus short-range, search versus tracking). The information sharing involved in the feedback process is complemented with the use of a memory, which in the radar case is constituted by a dynamic database. It contains knowledge sources about the operating context such as:
• geographic features of the illuminated area [9]: type of terrain, presence of clutter discretes, terrain elevation profiles (for instance gathered through Geographic Information Systems (GISs) or Digital Terrain Elevation Models (DTEMs));
• electromagnetic characteristics of the overlaid radiators: operating frequency, modulation and policy, activity profiles, location of transmitters (obtained through Radio Environment Maps (REMs) [10] which localize surrounding emissions in time, frequency, and space; and/or through spectrum sensing modules which continuously sound the environment and acquire fresh information on the external electromagnetic interference possibly used to update the content of the REMs);
• data from other sensors [11] (Synthetic Aperture Radars (SARs), infrared devices, meteorological measurements, etc.).
The overall information flow coordinates and triggers actions of the system. For example, with reference to the search process, it is exploited to devise the new transmit waveform [10], [12], to select the training data for receiver adaptation [9], [11], to censor data containing clutter discretes, to choose the most suitable detector within a battery available at the receiver. This implies a continuous adaptation of the pair perceptor-actuator ruled by the available information flow and possibly coordinated by a system manager. It is worth noting that the quoted diversity in the transmit-receive chain is actually already present in nature making the cognitive radar a bio-inspired concept. Many mammals with echolocation capabilities, in particular the bats [7, Chap. 6], in their natural behavioral phases, change the waveform in a spontaneous and systematic way, producing through tongue clicking a variety of modulated sonar signals. A nice example is the Eptesicus Nilssonii bat [7, Chap. 6]. While attempting to feed on prey, it changes the Pulse Repetition Time (PRT) and the waveform shape between the approach phase and the terminal phase. In fact, studying the wideband ambiguity function during the search phase, the bat is capable of resolving both in range and Doppler, then during the terminal phase, it improves the range resolution but the signal becomes quite Doppler tolerant. Interestingly, many preys also developed cognitive actions in terms of evasive behaviors [13] to counteract the bats’ sonar and to confuse it with false multiple echoes (a technique which clearly resembles Electronic CounterMeasures (ECMs) to deceive a radar).
Summarizing, the block scheme of a cognitive radar is displayed in Figure 2, which, as expected, highlights the much higher hardware complexity with respect to the classic adaptive radar architecture of Figure 3.
This poses many technological challenges connected with the implementation of the new cognitive radar paradigm. Some of them can be afforded with the advent of Redundant Array of Independent Disks (RAIDs), phased array with several transmit-receive modules, Multiple-Input Multiple-Output (MIMO) hardware capabilities, multi-polarization equipments, and Application Specific Integrated Circuit (ASIC) logics, etc. Algorithmic challenges are also present in order to exploit as efficiently as possible both the feedback information and the a-priori knowledge. A multitude of algorithms should be possibly run contemporaneously, pushing for the use of parallel computing architectures and programming.
A nice and simple example of a cognitive radar tracker is shown in [14]; this is probably among the first formulations of a fore-active radar, namely a first step towards radar cognition. The measurement noise depends on the action of the transmitter. That action is controlled by a transmit waveform parameter (i.e. pulse duration and chirp rate). The optimal signal selection to sound the scene is established through a feedback between the receiver and the transmitter. By doing so, a closed-loop around the environment is formed, whereby it becomes possible for the transmitter to exercise indirect control on the receiver via the environment.
In the remaining part of this paper a selected list of references is first provided and then three challenging signal processing applications involving cognitive radar are presented. They can lead to a significant potential performance improvement over a classic radar system thanks to the presence of pro-activity and the interaction with a dynamic environmental database.
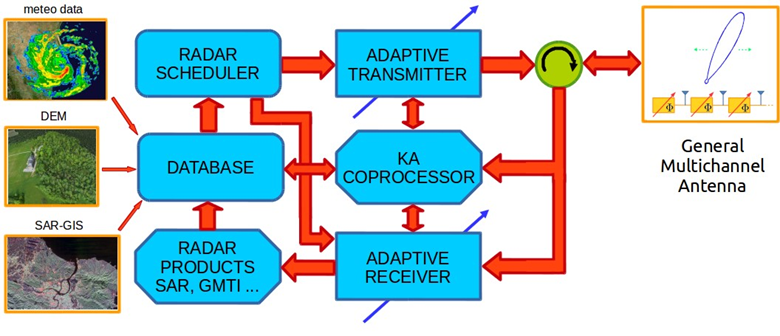
Figure 2: Block scheme of a cognitive radar.
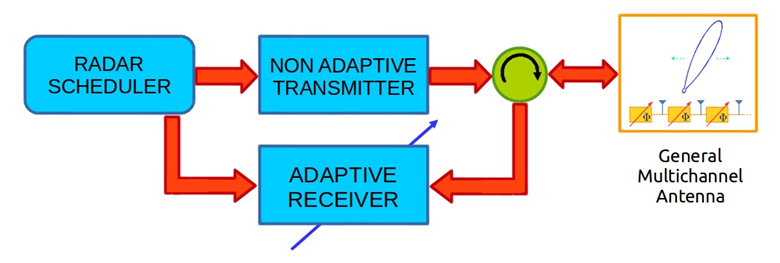
Figure 3: Classic adaptive radar architecture
Cognitive MIMO Radar Beampattern Shaping
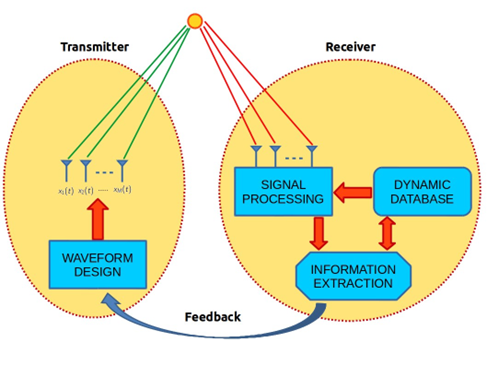
MIMO radar is a recently emerging paradigm enabling an enhanced performance over conventional radar in terms of target detection, identification, classification, and localization [26], [27]. Additionally, colocated MIMO radar allows a higher flexibility in the transmit beampattern shape [28] based on the ability to transmit distinct waveforms via the probing antennas.
This last feature is particularly attractive for cognitive radar systems where the transmitter dynamically selects the best transmit beampattern in response to the receiver feedbacks, accounting for both previous experience/measurements and stored information. For instance, if the receiver detects in some angles strong unwanted returns, due to both clutter discretes and non-threatening targets, the transmit beampattern can be shaped to exhibit small gain values in the mentioned directions so as to suppress the interference and to avoid overloading the processor with detections of no-tactical importance. Besides, multiple target tracking can be accomplished via multiple beams in the transmit beampattern possibly adaptively interleaved with search beams, thus enhancing the multi-functionality of the system.
Cognitive CFAR Processing Techniques
To mitigate the deleterious effects of clutter and jammer, modern radars have employed adaptive processing techniques such as Constant False Alarm Rate (CFAR) detectors, adaptive arrays, and Space Time Adaptive Processing (STAP) [31]. Typical adaptive algorithms estimate the disturbance covariance matrix of the data under test (primary data) using training (secondary) data collected from range cells in close proximity to the one under test with the assumption that primary and secondary data share the same spectral properties. However, this assumption is not always verified (training data are often contaminated by power and spectral variations over range, clutter discretes, and other outliers) and poor training data selection can produce significant performance degradation in terms of high false alarm rate and/or low detection probability [32].
To overcome this drawback the cognitive paradigm can be pursued assuming the presence of a lookahead processor [2] which projects a few seconds into the future to determine where the radar will be and what it will be doing. This information permits to access the memory information whose processing raises the attention on some specific task (for instance the presence of a range cell which contains a strong clutter discrete) and pushes for a subsequent action (training data selection, outlier rejection, etc.). Possible sources of information for this context are DTEMs, previous radar experiences, GISs, roadway maps (to highlight sectors of surveillance where moving cars or vehicles might be present), background of air/surface traffic, meteorological data, some electromagnetic reflectivity and spectral clutter models, system calibration information, which can be dynamically updated.